Arduino 超声波距离传感器17 Mar 2025 | 4 分钟阅读 超声波传感器或HC-SRO4用于使用声呐测量物体的距离。 它以40KHZ 或 40000 Hz的频率发射超声波。该频率穿过空气并撞击路径上的物体。光线从物体上弹回并返回到模块。 HC-SRO4 的四个端子是 VCC、TRIG、ECHO 和 GND。电压电源或VCC为+5V。 我们可以将 ECHO 和 TRIG 端子连接到特定 Arduino 板上的任何数字 I/O 引脚。 超声波传感器在中等距离范围内工作效果最佳。 分辨率为0.3cm。 传感器的中等范围是10cm到3m。 它在此持续时间内工作效果最佳。 传感器可能检测到的最大范围是4.5m。 超声波传感器如何工作?让我们了解传感器的工作原理。


示例让我们考虑一个例子。 物体距离超声波传感器 40 厘米。 空气中的声速为 340 米/秒。 我们需要计算时间(以微秒为单位)。 解决方案 v = 340m/s = 0.034cm/us (centimeter/microseconds) time = distance/speed time = 40/0.034 time = 1176 microseconds 来自 ECHO 引脚的声音速度将加倍,因为波向前和向后传播(弹跳)。 因此,要计算距离,我们需要将其除以 2。如下所示 distance = time x speed of sound/2 distance = time x 0.034/2 超声波传感器结构HC-SRO4 的结构如下所示  超声波传感器时序图我们将 TRIG 引脚设置为 HIGH 一段时间(大约 3 到 100 微秒)。 一旦 TRIG 引脚为 LOW,超声波传感器就会发送脉冲并将 ECHO 引脚设置为 HIGH。 当传感器获得反射脉冲时,它会将 ECHO 引脚设置为 LOW。 我们需要测量 ECHO 引脚为 HIGH 的时间。 超声波传感器 HC-SRO4 的时序图如下所示  让我们开始创建 Arduino 超声波传感器来测量距离。 所需硬件创建该项目所需的组件如下
原则我们需要首先将 TRIG (触发) 引脚设置为 HIGH。 它将发出 8 个周期的突发,称为声波突发,它将以声速传播。 它将被 ECHO 引脚进一步接收。 声波传播的时间被认为是 ECHO 引脚的输出时间,单位为微秒。 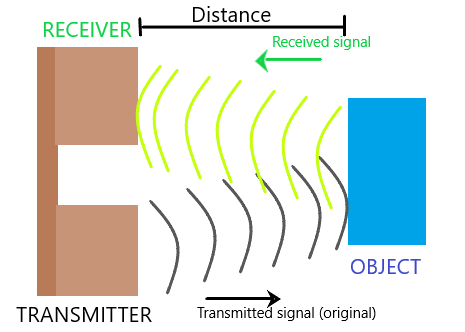 我们将使用 PulseIn() 函数从 ECHO 引脚的输出读取时间。 它将等待指定的引脚变为 HIGH 和 LOW。 该函数将在最后返回时间。 TRIG 引脚设置为 LOW 4 微秒,然后设置为 HIGH 15 微秒。 时间将以微秒为单位计算。 过程将超声波传感器连接到电路板的步骤如下所示
Sketch请看下面的代码 将代码上传到项目的步骤步骤如下
连接图连接图如下所示  输出 串行监视器上的输出将显示为  下一个主题超声波测距仪 |
我们请求您订阅我们的新闻通讯以获取最新更新。
我们提供所有技术(如 Java 教程、Android、Java 框架)的教程和面试问题
G-13, 2nd Floor, Sec-3, Noida, UP, 201301, India
