基于DTMF的手机控制机器人2025年3月17日 | 阅读 3 分钟 通常,无线控制机器人使用射频电路,但射频电路存在频率范围有限、工作范围有限以及控制有限等缺点。 在机器人控制中使用手机可以克服这些限制。它具有工作范围大的优点,只要服务提供商的覆盖范围足够大,控制稳定可靠,并且不会与其他控制器发生干扰。 工作方式在基于DTMF的手机/移动电话控制机器人中,AVR ATmega16单片机与键盘一起用作输入设备,以驱动机器人朝各个方向移动。 在这个项目中,使用了两部手机,一部手机将连接到DTMF电路,另一部手机将用于呼叫连接到DTMF电路的手机。 ATmega16单片机读取DTMF解码器的4位输出信号,并处理该信号以确定按下的是移动键盘上的哪个键,然后ATmega16单片机将控制信号发送到机器人的直流电机驱动器(L293D),以驱动机器人朝所需方向移动。 下表显示了不同的控制键及其等效的机器人方向:-
框图  考虑下表显示了键盘上不同按键的双音多频 (DTMF):-  所需硬件
所需软件
电路图 构建 源代码 以下显示了使用 BASCOM-AVR 集成开发环境 (IDE) 在手势控制机器人中使用的源代码的屏幕截图 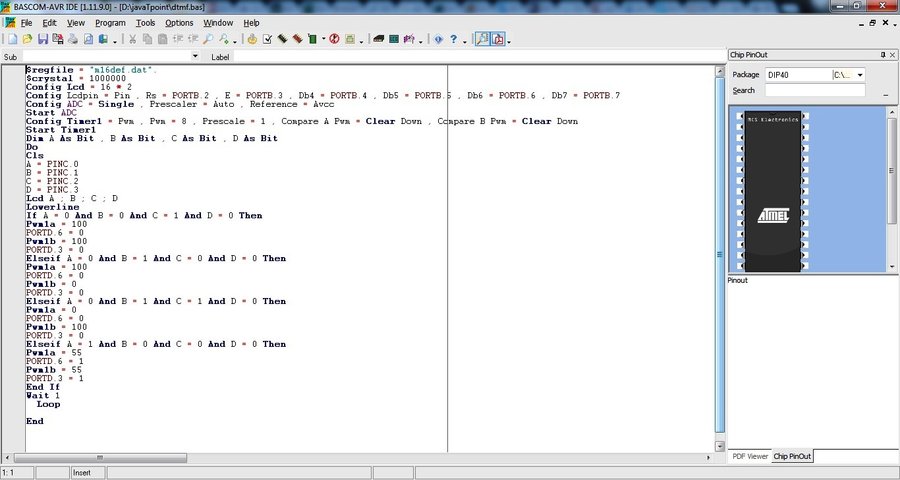 下一个主题面试问题 |
我们请求您订阅我们的新闻通讯以获取最新更新。
我们提供所有技术(如 Java 教程、Android、Java 框架)的教程和面试问题
G-13, 2nd Floor, Sec-3, Noida, UP, 201301, India
