实时系统中的任务28 Apr 2025 | 7 分钟阅读 实时操作系统 (RTOS) 为实时应用程序提供服务,这些应用程序在没有任何缓冲延迟的情况下处理数据。在 RTOS 中,处理时间要求以十分之一秒为增量计算。它是一个有时间限制的系统,被定义为具有固定时间约束。在这种类型的系统中,处理必须在规定的约束内完成。否则,系统将失败。 实时任务 是与时间定量表达式相关的任务。这种时间定量表达式描述了实时任务的行为。实时任务被调度以在时间约束内完成其中涉及的所有计算事件。与实时任务相关的时间约束是截止日期。所有实时任务都需要在截止日期前完成。例如,与设备的输入-输出交互、网页浏览等。 实时系统中的任务类型实时系统中的任务类型如下:  1. 周期任务 在周期任务中,作业以固定的时间间隔释放。周期任务会在固定的时间间隔后重复自身。周期任务由五个元组表示:Ti = < Φi, Pi, ei, Di > 其中,
例如:考虑周期为 5 且执行时间为 3 的任务 Ti 未给出相位,因此假设第一个作业的释放时间为零。所以这个任务的作业在 t = 0 时首次释放,然后执行 3 秒,然后下一个作业在 t = 5 时释放,执行 3 秒,下一个作业在 t = 10 时释放。因此,作业在 t = 5k(其中 k = 0, 1, . . . N)时释放。  一组周期任务的超周期是该集合中所有任务的最小公倍数。例如,两个周期分别为 4 和 5 的任务 T1 和 T2 的超周期为 H = lcm(p1, p2) = lcm(4, 5) = 20。超周期是作业释放时间模式开始重复后的时间。 2. 动态任务 它是一个由事件发生而调用的顺序程序。事件可能由系统外部的进程或系统内部的进程生成。动态到达的任务可以根据其重要性和对其发生时间的了解进行分类。
3. 关键任务 关键任务是指那些及时执行至关重要的任务。如果错过截止日期,将导致灾难。 例如,生命支持系统和飞机的稳定性控制。如果关键任务以更高的频率执行,那么这是必要的。 4. 非关键任务 非关键任务是实时任务。顾名思义,它们对应用程序并不关键。但是,它们可以处理时间,变化的数据,因此如果未在截止日期内完成,它们就毫无用处。调度这些任务的目标是最大化在截止日期内成功执行的作业的百分比。 任务调度实时任务调度本质上是指操作系统如何选择各种任务进行执行。每个操作系统都依赖一个或多个任务调度程序来准备运行各种任务所需的执行计划。每个任务调度程序都由其采用的调度算法来表征。到目前为止,已经开发了大量的实时调度任务算法。 任务调度分类实时系统中的任务调度类型如下: 
作业的优先约束如果作业可以按任何顺序执行,则任务中的作业是独立的。如果作业必须按特定顺序执行,则称作业具有优先约束。为了表示作业的优先约束,使用偏序关系 <,这称为优先关系。如果 Ji < Jj,则作业 Ji 是作业 Jj 的前驱,即 Jj 在 Ji 完成之前不能开始执行。如果 Ji < Jj,并且不存在其他作业 Jk 使得 Ji < Jk < Jj,则 Ji 是 Jj 的直接前驱。如果 Ji < Jj 或 Jj < Ji 都不成立,则 Ji 和 Jj 是独立的。 表示优先约束的有效方法是使用有向图 G = (J, <),其中 J 是作业集。此图称为优先图。图的顶点表示作业,优先约束使用有向边表示。如果从 Ji 到 Jj 有一条有向边,则表示 Ji 是 Jj 的直接前驱。 例如:考虑一个任务 T,它有 5 个作业 J1, J2, J3, J4 和 J5,使得 J2 和 J5 在 J1 完成之前不能开始执行,并且没有其他约束。此示例的优先约束是 J1 < J2 和 J1 < J5 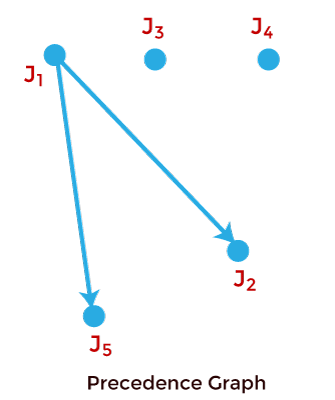 优先图的集合表示
再举一个例子,给出了一个优先图,需要找出优先约束。  从上面的图,我们得出以下优先约束
|
我们请求您订阅我们的新闻通讯以获取最新更新。
我们提供所有技术(如 Java 教程、Android、Java 框架)的教程和面试问题
G-13, 2nd Floor, Sec-3, Noida, UP, 201301, India
