根轨迹的基本概念17 Mar 2025 | 4 分钟阅读 在前面的章节中,我们研究了系统的稳定性。它取决于特征方程的根的位置。我们也可以说系统的稳定性取决于闭环极点的位置。这种关于当参数变化时,极点在 s 平面中运动的知识很重要。参数的微小变化可以极大地帮助系统设计。系统的瞬态响应的性质与 s 平面中极点的位置密切相关。 我们还研究了描述代数方程稳定性的劳斯-赫尔维茨判据。如果劳斯表中第一列中的任何一项发生符号变化,系统则倾向于变得不稳定。 根轨迹法是由 W.R Evans 在 1948 年提出的。根轨迹是一种图形方法,当特定参数从 0 变化到无穷大时,可以在 s 平面中找到极点的位置。假设要变化的参数通常是系统的增益。 考虑下面的闭环系统。 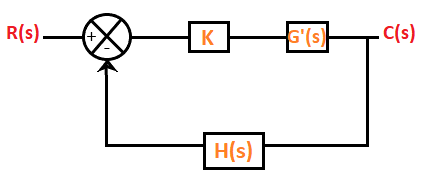 闭环系统的方程由下式给出 1 + G(s)H(s) = 0 其中, G(s) 是传递函数的增益 H(s) 是反馈增益 在根轨迹的情况下,增益 K 也被认为是闭环系统的一部分。K 称为系统增益或正向路径中的增益。包含正向增益后的特征方程可以表示为 1 + KG'(s)H(s) = 0 其中, G(s) = KG'(s) 当系统包含可变参数 K 时,闭环系统的根现在取决于“K”的值。 “K”可变值可以在两种情况下变化,如下所示  在第一种情况下,对于 K 的每个不同的值(整数或小数),我们将得到一组单独的根位置。如果连接所有这些位置,则得到的曲线定义为根轨迹。我们还可以将根轨迹定义为当系统增益“K”从 -无穷大 变化到 无穷大时获得的闭环极点的轨迹。 当 K 从 零到无穷大变化时,该图称为直接根轨迹。如果系统增益“K”从负无穷大变化到零,则由此获得的图称为反根轨迹。除非特别说明,否则通常假设增益 K 从零到无穷大。 让我们考虑一个例子。 示例:获得单位反馈系统的根轨迹,其中 G(s) = K/s。 如上所述,这是一个单位反馈系统。这意味着 H(s) = 1。 我们知道, 1 + G(s)H(s) = 0 1 + K/s = 0 S + K = 0 上述方程的根位于 s = -K 处。 根据条件,系统增益 K 从零变化到无穷大,除非状态。因此,当 K 从零变化到无穷大时,我们将通过连接所有这些位置来获得根轨迹。 在 K 的不同值下,给定方程的根的值在下表中给出
下面显示了 K 的上述值的根轨迹图 根轨迹的用途除了确定系统的稳定性外,根轨迹还有助于确定
根轨迹的优点根轨迹的优点如下
下一个主题根轨迹的角度和幅值条件 |
我们请求您订阅我们的新闻通讯以获取最新更新。
我们提供所有技术(如 Java 教程、Android、Java 框架)的教程和面试问题
G-13, 2nd Floor, Sec-3, Noida, UP, 201301, India
