根轨迹的例子17 Mar 2025 | 6 分钟阅读 在这里,我们将讨论一个根轨迹图的例子。如前所述,我们将遵循根轨迹的六个规则。我们还将讨论在根轨迹上添加极点和零点的影响。 在开始一个例子之前,让我们先讨论一下解决根轨迹问题的步骤。
大多数步骤可能会令人困惑。让我们讨论一个例子,它将帮助我们了解绘制根轨迹图的方法以及解释。 例子:绘制闭环系统的根轨迹图,其环路传递函数为G(s)H(s) = K/s(s + 5)(s + 10)同时找出系统是否稳定。解决方案:我们将按照上述步骤的步骤进行操作。 步骤 1: 找到极点、零点和分支。 给定传递函数的 Denominator 表示极点,Numerator 表示零点。因此,有 3 个极点,没有零点。 极点 = 0, -5 和 -10 零点 = 无零点 P - Z = 3 - 0 = 3 有三个分支 (P - Z) 趋向无穷大,并且没有开环零点。因此,无穷大将是根轨迹的终止点。 步骤 2: 根轨迹所在的实轴部分。 有三个极点,如下所示  在 0 和 -5 之间(例如,-3.5)的部分在其右侧只有一个极点。这意味着给定点一侧的极点和零点的总和为 1。 规则 3 描述了 0 和 -5 之间的部分位于根轨迹上。类似地,-10 之后的部分也位于根轨迹上。-5 和 -10 之间的部分在右侧有偶数个零点和极点。因此,实轴上 -5 和 -10 之间的根轨迹不存在。 给定系统的分离点将位于根轨迹存在的实轴部分之间,即 0 和 -5。 步骤 3: 渐近线的角度。 此类渐近线的角度由下式给出 = (2q + 1)180 / P - Z q = 0, 1, 和 2 对于 q = 0, 角度 = 180/3 = 60 度 对于 q = 1, 角度 = 3x180/3 = 180 度 当 q = 2 时, 角度 = 5x180/3 = 300 度 步骤 4: 质心 质心由下式给出  = 0 - 5 - 10 - 0/3 = -15/3 = -5 因此,根轨迹的质心位于实轴上的 -5 处。 显示质心和渐近线角度的图如下所示  步骤 5: 分离点 我们知道,分离点将位于 0 和 -5 之间。让我们找到有效的分离点。 1 + G(s)H(s) = 0 将给定传递函数的值代入上述方程,我们得到 1 + K/s(s + 5)(s + 10) = 0 s(s + 5)(s + 10) + K = 0 s(s2 + 15s + 50) + K = 0 s3 + 15s2 + 50s + K = 0 K = - s3 - 15s2 - 50s 对两边求导, Dk/ds = - (3s2 + 30s + 50) = 0 3s2 + 30s + 50 = 0 将等式除以 3,我们得到 s2 + 10s + 16.667 = 0 现在,我们将使用公式找到给定方程的根  使用值 a = 1, b = 10, 和 c = 16.667 该方程的根将是 -2.113 和 -7.88。 在这两个根中,只有 -2.113 位于 0 和 -5 之间。因此,这将是分离点。 让我们通过将根的值代入方程 K = - s3 - 15s2 - 50s 来验证。 K = - -2.113 3 - 15(-2.113)2 - 50(-2.113) K = 48.112 发现 K 的值为正数。因此,这是一个有效的分离点。 步骤 6: 与负实轴的交点。 在这里,我们将使用 Routh Hurwitz 准则,使用方程 s3 + 15s2 + 50s + K = 0 找到根轨迹在虚轴上的交点 Roth 表如下所示
从第 3 行 s, 750 - K/K = 0 750 - K = 0 K = 750 从第 2 行 s2, 15 s2 + K = 0 将 Kin 的值代入上述方程,我们得到 15 s2 = -750 s2 = -750/15 s2 = -50 s = j7.071 和 -j7.071 这两个点都位于正虚轴和负虚轴上。 步骤 7: 给定传递函数中不存在复极点。因此,不需要出发角。 步骤 8: 组合以上所有步骤。 因此,组合以上所有步骤后形成的根轨迹如下所示 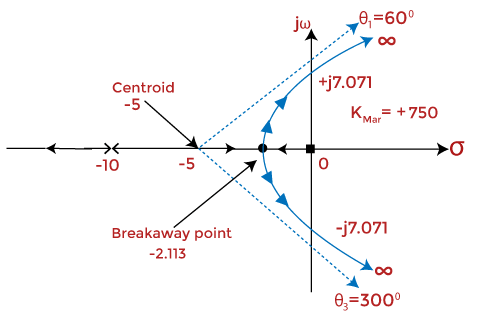 步骤 9: 系统的稳定性 系统可以是稳定的、临界稳定的或不稳定的。在这里,我们将根据上述 Roth Hurwitz 准则确定系统对于不同 K 值的稳定性。 如果 K 的值介于 0 和 750 之间,则系统是稳定的。K 的根轨迹位于 s 平面的左半部分。对于大于 750 的值,系统变得不稳定,这是因为根开始向 s 平面的右半部分移动。但是,在 K = 750 时,系统是临界稳定的。 我们可以得出结论,稳定性基于根在 s 平面的左半部分或右半部分的位置。 添加极点和零点对根轨迹的影响让我们讨论添加极点和零点对根轨迹的影响。 添加极点的影响将极点添加到 s 平面的左半部分的影响将把根轨迹推向 s 平面的右侧。我们知道,当根位于 s 平面的左半部分时,系统趋于稳定。当根轨迹向右半部分移动时,稳定性会降低 reduces。 这意味着在根轨迹上添加极点会降低系统的稳定性。系统“K”的范围和增益裕度也会降低。 例如: 考虑系统 G(s)H(s) = K/s(s + 2)(s + 4) 的图。  现在,让我们向上述系统添加 s = -6 极点。根轨迹图现在将显示为  G(s)H(s) = K/s(s + 2)(s + 4)(s + 6)。 我们可以注意到,添加极点导致根轨迹也向 s 平面的右半部分移动。 添加零点的影响添加零点的影响将把根轨迹推向 s 平面的 左侧。我们知道,当根位于 s 平面的左半部分时,系统趋于稳定。当根轨迹向左半部分移动时,稳定性会提高。这意味着在根轨迹上添加零点将提高系统的稳定性。系统“K”的范围和增益裕度也会增加。 在这里,根轨迹将向添加的零点移动。 例如: 考虑系统 G(s)H(s) = K(s + 4)/s(s + 2)。 现在,让我们向上述系统添加零点 s = -6。根轨迹图现在将显示为 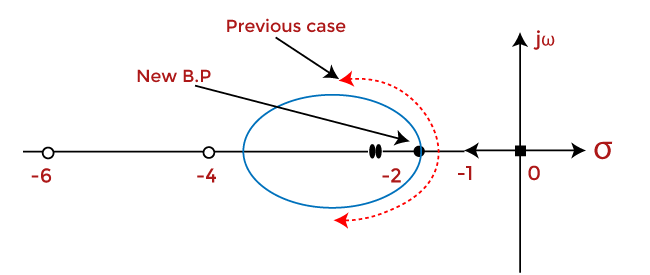 G(s)H(s) = K(s + 4)(s + 6)/s(s + 2)。 我们可以注意到,添加极点导致根轨迹也向 s 平面的右半部分移动。 下一个主题频率响应的基本概念 |
我们请求您订阅我们的新闻通讯以获取最新更新。
我们提供所有技术(如 Java 教程、Android、Java 框架)的教程和面试问题
G-13, 2nd Floor, Sec-3, Noida, UP, 201301, India
