MATLAB 中的机器人工具箱 - 运动学和动力学2025年7月24日 | 阅读 7 分钟 引言MATLAB 中的机器人工具箱是一个功能强大的工具,用于模拟和分析机器人系统,使用户能够轻松设计、建模和控制各种类型的机器人。它提供了一套全面的函数和类,用于机器人运动学、动力学、轨迹规划和传感器集成等任务。该工具箱支持刚体机器人和移动机器人,适用于从工业机械手到自动驾驶汽车的各种应用。 机器人工具箱的一些主要功能包括 - 运动学和动力学: 支持机器人手臂和移动机器人的正向和反向运动学、动力学方程和运动建模。
- 轨迹规划: 用于生成路径和轨迹的工具,包括关节空间和笛卡尔空间规划。
- 机器人可视化: 机器人及其环境的 3D 可视化,允许用户模拟和分析机器人运动。
- 传感器和感知: 集成 LIDAR、相机模型和 IMU 等传感器,用于机器人中的感知任务。
机器人工具箱非常适合在模拟中开发算法,然后将其部署到真实硬件上,从而简化机器人开发过程。 MATLAB 的机器人工具包的预期用途到底是什么?MATLAB 中的机器人工具箱提供了广泛的函数,用于建模、模拟和控制机器人系统。以下是一些按其目的分类的关键函数 1. 机器人运动学和动力学 - rigidBodyTree: 创建用于机器人运动学和动力学的刚体树模型。
- show: 可视化机器人及其配置。
- getTransform: 计算正向运动学以获取两个刚体框架之间的变换矩阵。
- inverseKinematics: 求解关节角度以达到所需的末端执行器位置。
- forwardDynamics: 根据机器人的动力学和施加的力来模拟机器人的运动。
- massMatrix: 根据机器人的配置计算其质量矩阵。
2. 路径和轨迹规划 - pathPlannerRRT: 实现快速探索随机树 (RRT) 用于路径规划。
- manipulatorRRT: 为机器人机械手生成无碰撞路径。
- polytraj: 为机器人手臂或移动机器人创建平滑的多项式轨迹。
- trapveltraj: 生成梯形速度曲线轨迹。
3. 运动控制 - controllerPurePursuit: 为移动机器人路径跟踪实现纯追踪算法。
- controllerVFH: 实现矢量场直方图 (VFH) 避障算法。
step: 在仿真循环中计算控制器的下一步。 4. 机器人可视化和仿真 - show: 在 3D 环境中可视化机器人模型或其运动。
- robotics.trajectory: 模拟机器人轨迹并可视化规划路径。
- robotics.BinaryOccupancyGrid: 为移动机器人仿真中的环境映射创建占用网格。
- helperCreateRobotModel: 在仿真中创建和配置机器人模型。
5. 传感器仿真和感知 - rangeSensor: 模拟 LIDAR 等测距传感器以进行障碍物检测。
- readBinaryOccupancyGrid: 解释传感器数据以用于占用图。
- monteCarloLocalization: 实现蒙特卡洛定位以根据传感器数据估计机器人的位置。
6. 移动机器人算法 - pathPlannerAStar: 为移动机器人实现 A* 路径规划算法。
- prm: 用于路径规划的概率路线图。
- odometryMotionModel: 使用里程计数据模拟移动机器人运动。
7. 碰撞检测 - checkCollision: 确定机器人或路径是否与环境中的障碍物发生碰撞。
- robotics.OccupancyGrid: 使用占用网格表示障碍物以进行碰撞检查。
8. SLAM(同步定位与建图) - lidarSLAM: 使用 LIDAR 传感器数据实现 SLAM,用于构建环境地图同时定位机器人。
这些功能使得在 MATLAB 环境中设计、模拟和控制机器人系统(从工业机械手到自主移动机器人)变得容易。 我可以使用 MATLAB 来构造机器人设备吗?要在 MATLAB 中使用 **机器人工具箱** 创建机器人,您首先使用 `rigidBodyTree` 类构建机器人的运动学模型。此类将机器人表示为由关节连接的刚体(连杆)树。 每个连杆都被定义为 `rigidBody`,连接连杆的每个关节都由 `rigidBodyJoint` 表示。例如,一个简单的 2 连杆机器人可以通过定义两个连杆来创建,每个连杆都有一个旋转关节,允许围绕一个轴移动。您可以指定连杆的长度以及基座和每个连杆之间的变换,以正确地将关节定位在空间中。 定义机器人结构后,您可以使用 `show` 函数在 3D 中将其可视化。此外,您可以通过设置其角度来配置机器人的关节,并计算正向运动学以确定机器人末端执行器的位置和方向。这使您可以在虚拟环境中模拟和分析机器人的运动和交互。 MATLAB 中机器人工具箱的应用有哪些?MATLAB 中的机器人工具箱功能多样,在各个领域都有应用,包括 - 工业自动化: 机器人工具箱允许模拟和控制用于制造的机器人机械手,例如取放机器人、焊接机器人和装配线机器人。
- 自主车辆: 该工具箱用于建模和控制自主车辆,包括无人机和自动驾驶汽车。它提供了路径规划、传感器集成和定位工具,这些对于开发自主系统至关重要。
- 医疗机器人: 机器人工具箱可用于原型设计和控制手术机器人。这些机器人需要精确控制和复杂的轨迹规划,可以在 MATLAB 中进行开发和测试,然后进行实际部署。
- 教育机器人: MATLAB 易于使用,使机器人工具箱成为教育目的的理想选择,帮助学生和研究人员理解机器人学中的运动学、动力学、控制和传感器集成。
- 研究与开发: 机器人研究人员使用该工具箱设计和模拟复杂的机器人系统。例如,人机交互、群机器人和移动机器人导航等领域的研究经常利用机器人工具箱进行原型设计和测试。
运动学和动力学在机器人工具箱的机器人建模中的重要性是什么?运动学和动力学是机器人建模和控制的基础概念 - 运动学: 运动学描述机器人的运动,而不考虑力。它用于根据关节角度计算机器人连杆的位置、方向和 速度。在机器人学中,运动学对于路径规划至关重要,因为它能够计算给定关节配置下机器人末端执行器的位置。机器人工具箱提供正向和反向运动学函数,允许用户计算和控制机器人末端执行器的位置。
- 动力学: 动力学处理产生运动所需的力和扭矩。了解机器人的动力学对于设计能够处理复杂运动同时保持稳定性的控制系统至关重要。例如,为了举起或移动重物,动力学方程考虑了惯性、关节加速度和外部力。机器人工具箱包括用于计算质量矩阵、科里奥利效应和所需关节扭矩的工具,帮助用户模拟逼真的机器人行为。
示例输出 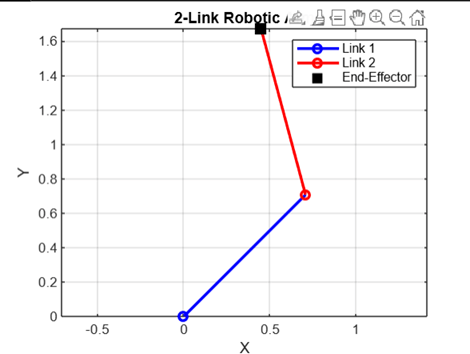 步骤 1:定义连杆长度 - L1 和 L2 是两个连杆的长度。这里,两个连杆都设置为 1 个单位长度,但您可以更改这些值以表示机器人手臂的实际尺寸。
步骤 2:以弧度定义关节角度 - theta1 和 theta2 表示两个关节的旋转角度,单位为弧度。
- theta1 = pi/4 表示第一个关节的 45 度角。
- theta2 = pi/3 表示第二个关节的 60 度角。
- 角度以弧度表示(1 弧度 ≈ 57.3 度),MATLAB 将其用于 三角 计算。
步骤 3:使用正向运动学计算每个关节的位置 - 基座坐标 (x0, y0)
- 将原点 (0, 0) 设置为机器人基座的起始位置。
- 第一个关节的位置 (x1, y1)
- 使用三角学,计算第一个关节相对于基座的位置
- x1=x0+L1×cos(θ1)x1 = x0 + L1 \times \cos(\theta1)x1=x0+L1×cos(θ1)
- y1=y0+L1×sin(θ1)y1 = y0 + L1 \times \sin(\theta1)y1=y0+L1×sin(θ1)
- 这些公式使用 cos 和 sin 函数根据第一个连杆的长度和角度 theta1 来投影其末端。
- 末端执行器的位置 (x2, y2)
- 末端执行器是第二个连杆的末端。
- 通过加上第一个关节的位置 (x1, y1) 并应用第二个关节的旋转角度 theta2 来计算其相对于基座的位置
- x2=x1+L2×cos(θ1+θ2)x2 = x1 + L2 \times \cos(\theta1 + \theta2)x2=x1+L2×cos(θ1+θ2)
- y2=y1+L2×sin(θ1+θ2)y2 = y1 + L2 \times \sin(\theta1 + \theta2)y2=y1+L2×sin(θ1+θ2)
- 这里,theta1 + theta2 表示第二个关节相对于基座的总角度。
步骤 4:显示结果 - disp 函数显示第一个关节 (x1, y1) 和末端执行器 (x2, y2) 的 (x, y) 坐标,这有助于确认计算是否正确。
步骤 5:绘制 2 连杆机器人 - 绘制连杆 1
- 从基座 (x0, y0) 到第一个关节 (x1, y1) 绘制一条蓝色线,表示第一个连杆。
- 绘制连杆 2
- 从第一个关节 (x1, y1) 到末端执行器 (x2, y2) 绘制一条红色线,表示第二个连杆。
- 绘制末端执行器
- 格式化绘图
- grid on 和 axis equal 确保绘图具有网格线和统一缩放。
- xlabel、ylabel 和 title 标记轴并添加标题。
- legend 添加连杆 1、连杆 2 和末端执行器的标签。
此代码提供了一种基本但功能强大的方法,可以在 2D 中模拟和可视化 2 连杆机器人手臂,而无需任何专用工具箱。
下一主题
|
