AVL 树2025年3月17日 | 阅读 7 分钟 AVL 树由 GM Adelson - Velsky 和 EM Landis 于 1962 年发明。该树以其发明者的名字命名为 AVL。 AVL 树可以定义为一种高度平衡的二叉搜索树,其中每个节点都关联一个平衡因子,该因子是通过从其左子树的高度中减去其右子树的高度来计算的。 如果每个节点的平衡因子都在 -1 到 1 之间,则该树被认为是平衡的;否则,该树将不平衡,需要进行平衡。 平衡因子 (k) = 高度 (左(k)) - 高度 (右(k))如果任何节点的平衡因子为 1,则表示左子树比右子树高一级。 如果任何节点的平衡因子为 0,则表示左子树和右子树的高度相等。 如果任何节点的平衡因子为 -1,则表示左子树比右子树低一级。 下图所示为一棵 AVL 树。我们可以看到,每个节点的平衡因子都在 -1 和 +1 之间。因此,它是一棵 AVL 树的例子。  复杂度
AVL 树上的操作由于 AVL 树也是一种二叉搜索树,因此所有操作的执行方式与二叉搜索树中的操作相同。搜索和遍历不会导致 AVL 树属性的违反。但是,插入和删除可能会违反此属性,因此需要重新审视。
为什么选择 AVL 树?AVL 树通过防止二叉搜索树变得倾斜来控制其高度。高度为 h 的二叉搜索树的各项操作所需时间为 **O(h)**。但是,如果 BST 变得倾斜(即最坏情况),则可以扩展到 **O(n)**。通过将此高度限制为 log n,AVL 树对每次操作施加了 **O(log n)** 的上限,其中 n 是节点数。 AVL 旋转只有当平衡因子不是 **-1、0 或 1** 时,我们才在 AVL 树中执行旋转。基本上有四种类型的旋转,如下所示:
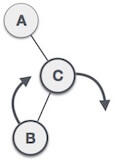
其中节点 A 是平衡因子不为 -1、0、1 的节点。 前两种旋转 LL 和 RR 是单次旋转,后两种旋转 LR 和 RL 是双次旋转。要使树不平衡,最小高度必须至少为 2。让我们来理解每种旋转。 1. RR 旋转当 BST 由于节点插入到 A 的右子树的右子树中而不平衡时,我们将执行 RR 旋转。 RR 旋转是一种逆时针旋转,应用于平衡因子为 -2 的节点下方的边。 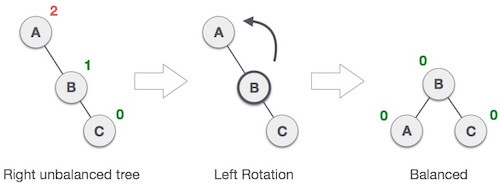 在上面的示例中,节点 A 的平衡因子为 -2,因为节点 C 被插入到 A 的右子树的右子树中。我们在 A 下方的边上执行 RR 旋转。 2. LL 旋转当 BST 由于节点插入到 C 的左子树的左子树中而不平衡时,我们将执行 LL 旋转。 LL 旋转是一种顺时针旋转,应用于平衡因子为 2 的节点下方的边。  在上面的示例中,节点 C 的平衡因子为 2,因为节点 A 被插入到 C 的左子树的左子树中。我们在 A 下方的边上执行 LL 旋转。 3. LR 旋转双旋转比上面解释的单次旋转要复杂一些。LR 旋转 = RR 旋转 + LL 旋转,即首先对子树执行 RR 旋转,然后对整个树执行 LL 旋转,整个树是指从插入节点的路径开始的第一个平衡因子不为 -1、0 或 1 的节点。 让我们非常清楚地理解每一步。
4. RL 旋转如前所述,双旋转比上面解释的单次旋转要复杂一些。 RL 旋转 = LL 旋转 + RR 旋转,即首先对子树执行 LL 旋转,然后对整个树执行 RR 旋转,整个树是指从插入节点的路径开始的第一个平衡因子不为 -1、0 或 1 的节点。
问:构造一个包含以下元素的 AVL 树H, I, J, B, A, E, C, F, D, G, K, L 1. 插入 H, I, J  插入上述元素后,特别是在 H 的情况下,BST 会变得不平衡,因为 H 的平衡因子为 -2。由于 BST 是右倾斜的,我们将对节点 H 执行 RR 旋转。 最终的平衡树是  2. 插入 B, A  插入上述元素后,特别是在 A 的情况下,BST 会变得不平衡,因为 H 和 I 的平衡因子为 2,我们考虑从最后一个插入的节点(即 H)开始。由于从 H 开始的 BST 是左倾斜的,我们将对节点 H 执行 LL 旋转。 最终的平衡树是  3. 插入 E  插入 E 后,BST 会变得不平衡,因为 I 的平衡因子为 2。由于从 E 到 I 的路径表明它被插入到 I 的右子树的左子树中,我们将对节点 I 执行 LR 旋转。LR = RR + LL 旋转。 3 a) 我们首先对节点 B 执行 RR 旋转。 RR 旋转后的树形是  3b) 我们首先对节点 I 执行 LL 旋转。 LL 旋转后的平衡树形是  4. 插入 C, F, D  插入 C、F、D 后,BST 会变得不平衡,因为 B 和 H 的平衡因子为 -2。由于从 D 到 B 的路径表明它被插入到 B 的左子树的右子树中,我们将对节点 I 执行 RL 旋转。RL = LL + RR 旋转。 4a) 我们首先对节点 E 执行 LL 旋转。 LL 旋转后的树形是  4b) 然后我们对节点 B 执行 RR 旋转。 RR 旋转后的平衡树形是  5. 插入 G  插入 G 后,BST 会变得不平衡,因为 H 的平衡因子为 2。由于从 G 到 H 的路径表明它被插入到 H 的右子树的左子树中,我们将对节点 I 执行 LR 旋转。LR = RR + LL 旋转。 5 a) 我们首先对节点 C 执行 RR 旋转。 RR 旋转后的树形是 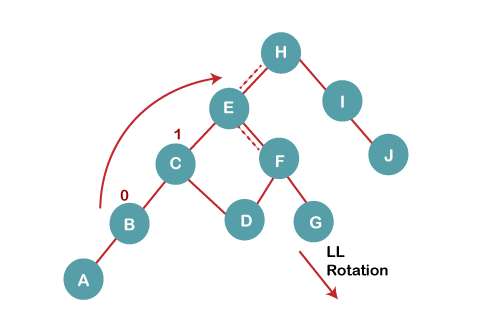 5 b) 然后我们对节点 H 执行 LL 旋转。 LL 旋转后的平衡树形是  6. 插入 K  插入 K 后,BST 会变得不平衡,因为 I 的平衡因子为 -2。由于从 I 到 K 的 BST 是右倾斜的,因此我们将对节点 I 执行 RR 旋转。 RR 旋转后的平衡树形是  7. 插入 L 插入 L 后,树仍然是平衡的,因为每个节点的平衡因子现在都是 -1、0 或 +1。因此,该树是一棵平衡的 AVL 树。  下一个主题B 树 |
我们请求您订阅我们的新闻通讯以获取最新更新。
我们提供所有技术(如 Java 教程、Android、Java 框架)的教程和面试问题
G-13, 2nd Floor, Sec-3, Noida, UP, 201301, India